Robotics
-
Open-vocabulary affordance detection using knowledge distillation and text-point correlation
-T. Van Vo, M. Nhat Vu, B. Huang, T. Nguyen, N. Le, T. Vo, A. Nguyen, ICRA, 2024
-
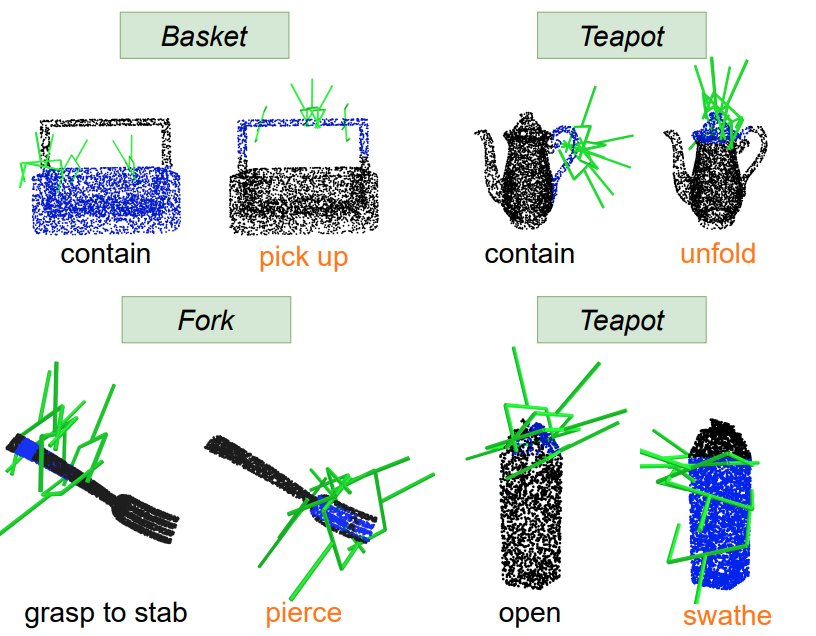
Language-Conditioned Affordance-Pose Detection in 3D Point Clouds
-T. Nguyen, M. Nhat Vu, B. Huang, T. Van Vo, V. Truong, N. Le, T. Vo, B. Le, A. Nguyen, ICRA, 2024
-

Open-Fusion: Real-time Open-Vocabulary 3D Mapping and Queryable Scene Representation
-K. Yamazaki, T. Hanyu, K. Vo, T. Pham, M. Tran, G. Doretto, A. Nguyen, N. Le, ICRA, 2024
-
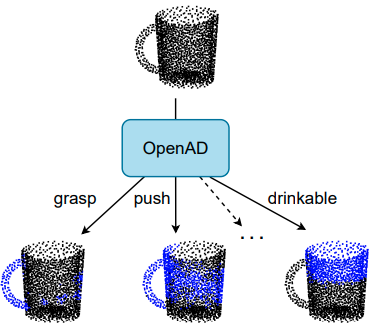
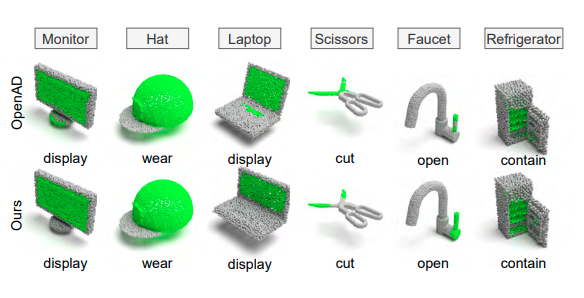
Open-Vocabulary Affordance Detection in 3D Point Clouds
-T. Ngyen, M. N. Vu, A. Vuong, D. Nguyen, T. Vo, N. Le, A. Nguyen, iROS, 2023
-
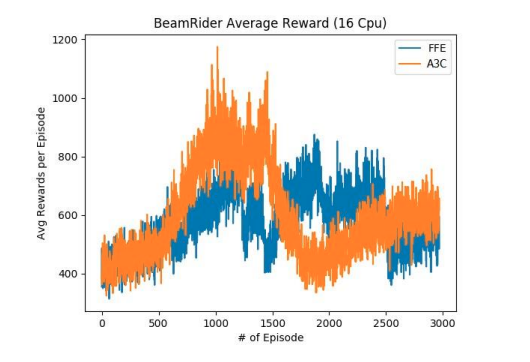
Follow then Forage Exploration: Improving Asynchronous Advantage Actor Critic
-James B. Holliday, N Le, CSIT, 2020
-

Robust Gait Learning
-While quadrupeds can open the operational domains of robots thanks to their dynamic locomotion capabilities, conventional controllers for legged locomotion constraint their applications to relatively simple environments that can be taken over by wheeled robots. Here we use reinforcement learning to train a quadruped to walk on various terrains. In the simulation, a quadruped robot (Unitree Go1) learns to walk across challenging terrain, including uneven surfaces, slopes, stairs, and obstacles, while following linear- and angular- velocity commands.
Computer Vision
-

OTAdapt: Optimal Transport-based Approach For Unsupervised Domain Adaptation
-T.-D Truong, N. V. Sai Raviteja Chappa, X. B. Nguyen, N. Le, A. Dowling, K. Luu , ICPR, 2022
-
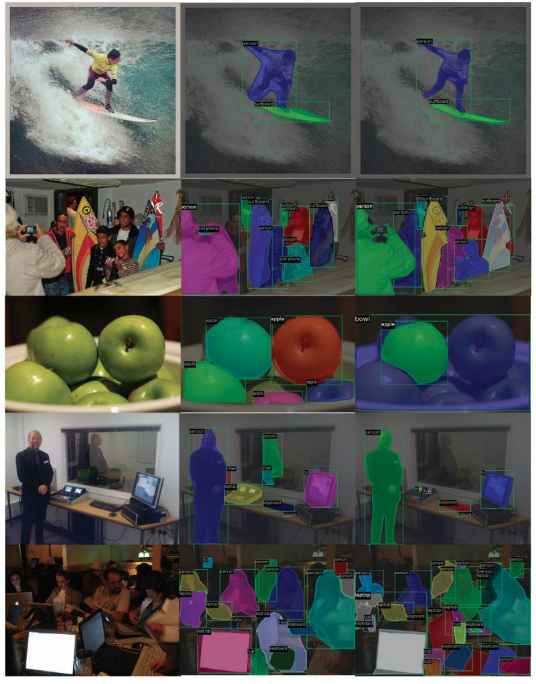
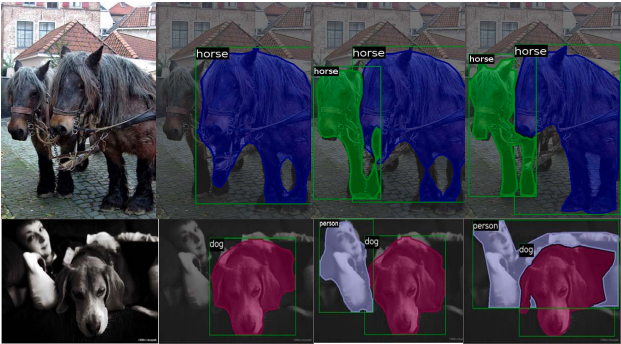
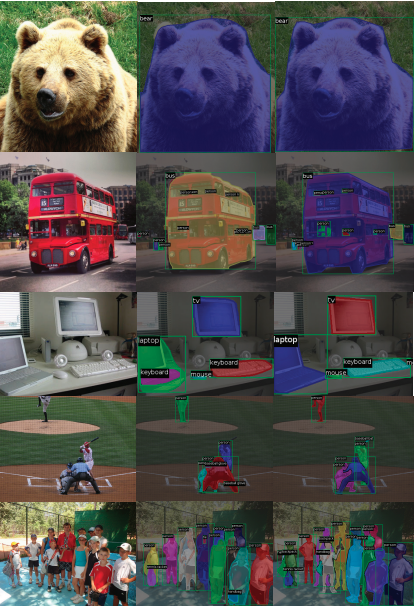
AISFormer: Amodal Instance Segmentation with Transformer
-M. Tran, K. Vo, K. Yamazaki, A. Fernandes, M. Kidd, N. Le, BMVC, 2022
-

Fast flow reconstruction via robust invertible n× n convolution
-T.-D Truong, C. N. Duong, M.-T Tran, N. Le, K. Luu, MDPI, 2021
-
Recurrent level set networks for instance segmentation
-N. Le, K. Luu, M. Savvides, K. G. Quach, C. N. Duong, IntechOpen, 2019
-
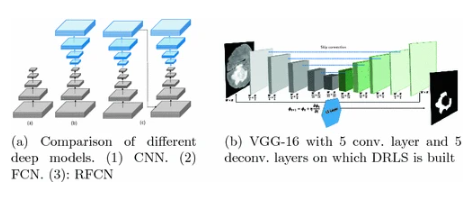
Reformulating level sets as deep recurrent neural network approach to semantic segmentation
-N. Le, K. G. Quach, K. Luu, C. N. Duong, M. Savvides, IEEE, 2018
-
Contextual Recurrent Level Set Networks and Recurrent Residual Networks for Semantic Labeling
-N. Le, Carnegie Mellon University, 2018
-

DeepSafeDrive: A grammar-aware driver parsing approach to Driver Behavioral Situational Awareness (DB-SAW)
-N. Le, C. Zhu, Y. Zheng, K. Luu, M. Savvides, Pergamon, 2017
-
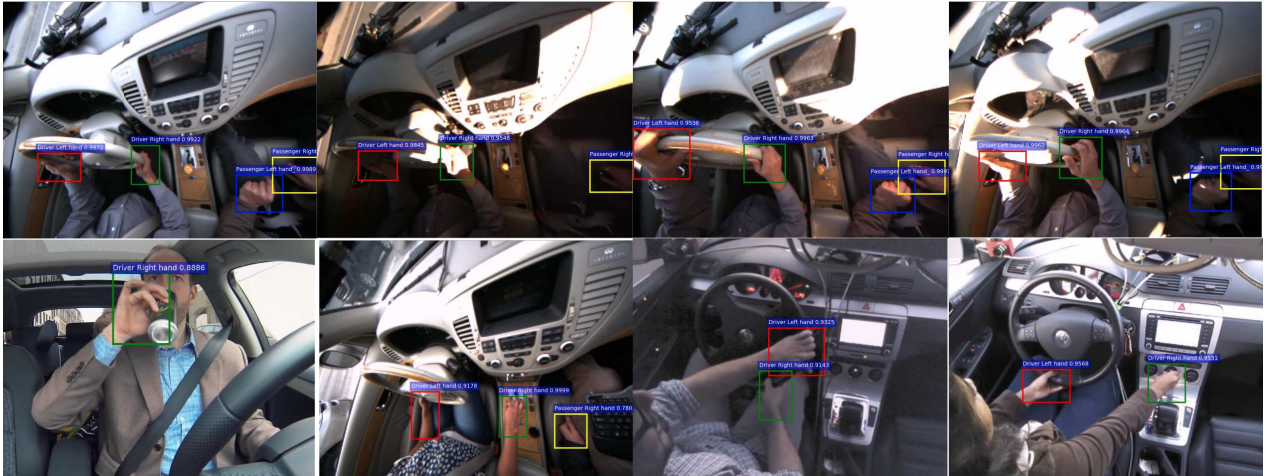
Robust Hand Detection and Classification in Vehicles and in the Wild.
-C. N. Duong, K. G. Quach, K. Luu, N. Le, M. Savvides, IEEE, 2017
-

Multiple scale faster-rcnn approach to driver's cell-phone usage and hands on steering wheel detection
-N. Le, Y. Zheng, C. Zhu, K. Luu, M. Savvides, IEEE, 2016
-
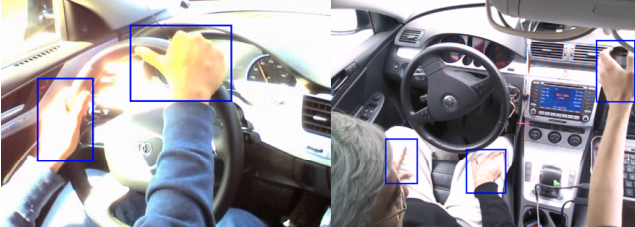
Robust hand detection in vehicles
-N. Le, C. Zhu, Y. Zheng, K. Luu, M. Savvides, IEEE, 2016
-

Z-GMOT with MA-SORT: Zero-shot Generic Multiple Object Tracking (GMOT) with Motion Appearance SORT (MA-SORT)
-K. H. Tran, A. D. Le Dinh, T. P. Nguyen, T. Phan, P. Nguyen, K. Luu, D. Adjeroh, G. Doretto, N. Le, Accepted to NAACL findings 2024 , 2024
-
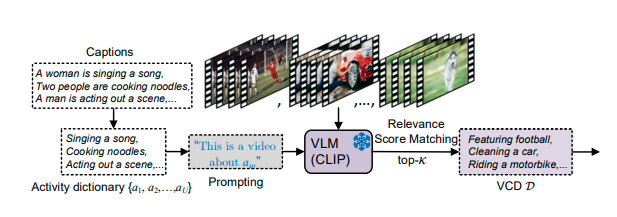
WAVER: Writing-style Agnostic Video Retrieval via Distilling Vision-Language Models Through Open-Vocabulary Knowledge
-H. Le, T. Kieu, A. Nguyen, N. Le , ICASSP, 2024
-
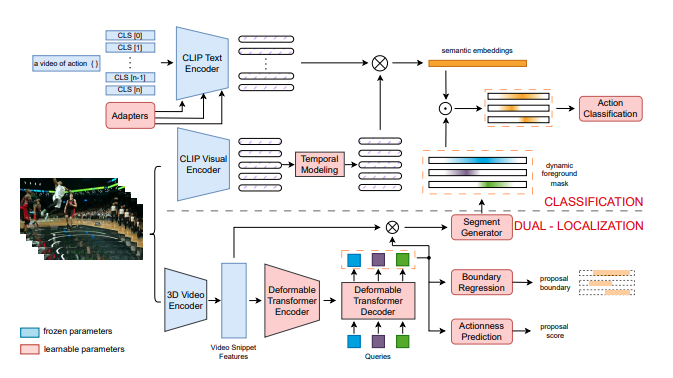
ZEETAD: Adapting Pretrained Vision-Language Model for Zero-Shot End-to-End Temporal Action Detection
-T. Phan, K. Vo, D. Le, G. Doretto, D. Adjeroh, N. Le , WACV, 2024
-
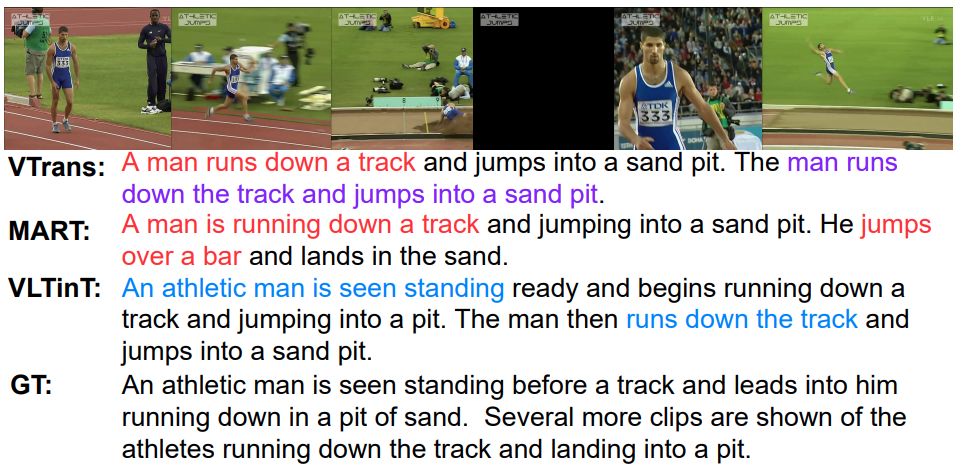
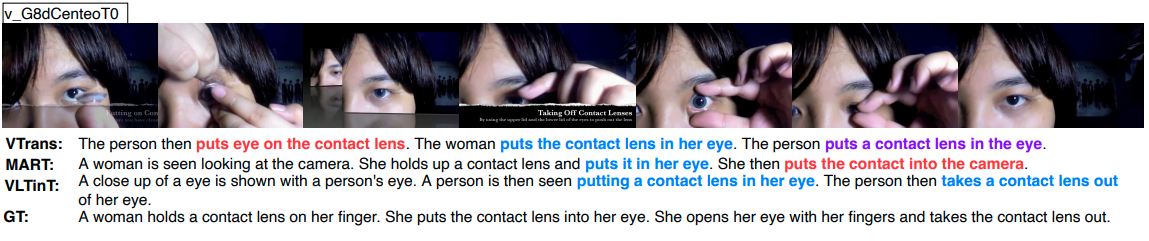
VLTinT: Visual-Linguistic Transformer-in-Transformer for Coherent Video Paragraph Captioning
-K. Yamazaki, K. Vo, S. Truong, B. Raj, N. Le, AAAI, 2023
-
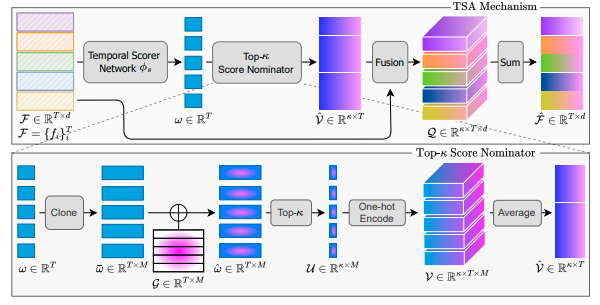
CLIP-TSA: CLIP-Assisted Temporal Self-Attention for Weakly-Supervised Video Anomaly Detection
-D. Le, S. Truong, P. Brijesh, D. A. Adjeroh, N. Le, ICIP, 2023
-
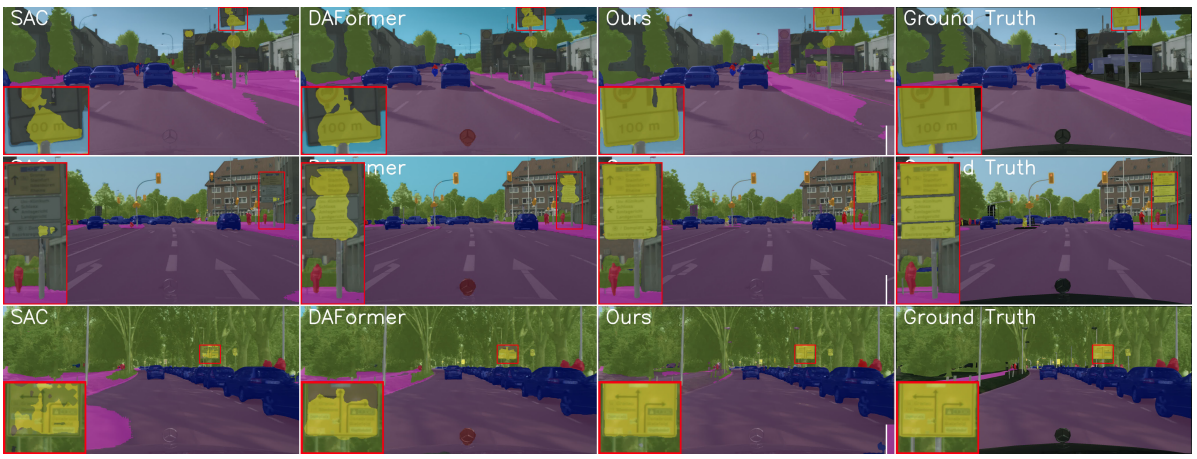
Fredom: Fairness domain adaptation approach to semantic scene understanding
-T.-D Truong, N. Le, B. Raj, J. Cothren, K. Luu, IEEE/CVF, 2023
-

Non-volume preserving-based fusion to group-level emotion recognition on crowd videos
-K. G. Quach, N. Le, C. N. Duong, I. Jalata, K. Roy, K. Luu , Pergamon, 2022
-
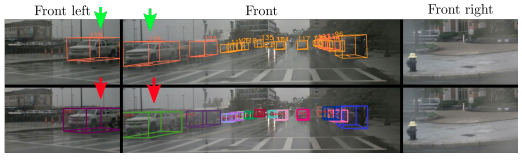
Multi-Camera Multiple 3D Object Tracking on the Move for Autonomous Vehicles
-P. Nguyen, K. G. Quach, C. N. Duong, N. Le, X.-B. Nguyen, K. Luu, CVPR, 2022
-
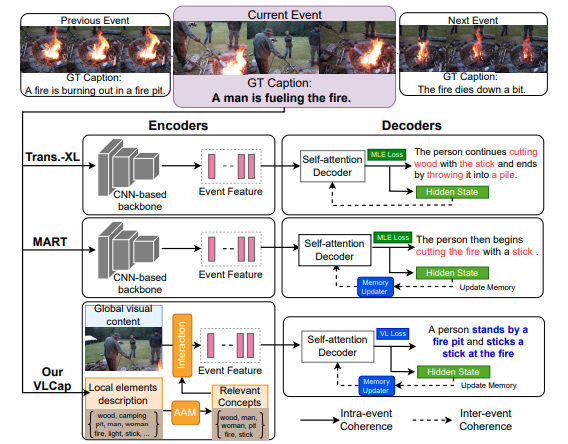
VLCap: Vision-Language with Contrastive Learning for Coherent Video Paragraph Captioning
-K. Yamazaki, S. Truong, K. Vo, M. Kidd, C. Rainwater, K. Luu, N. Le, ICIP, 2022
-
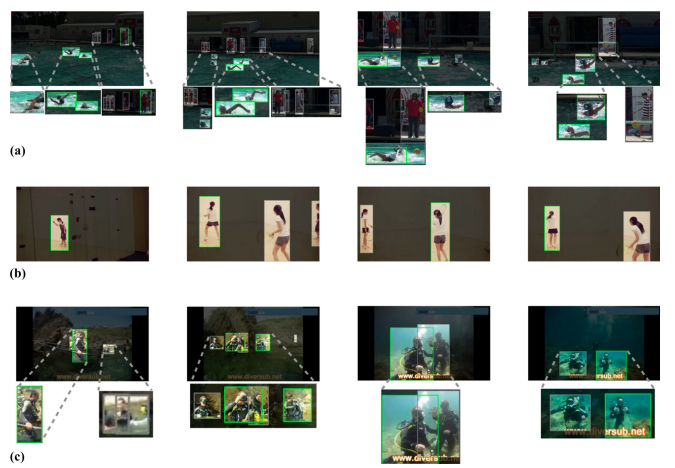
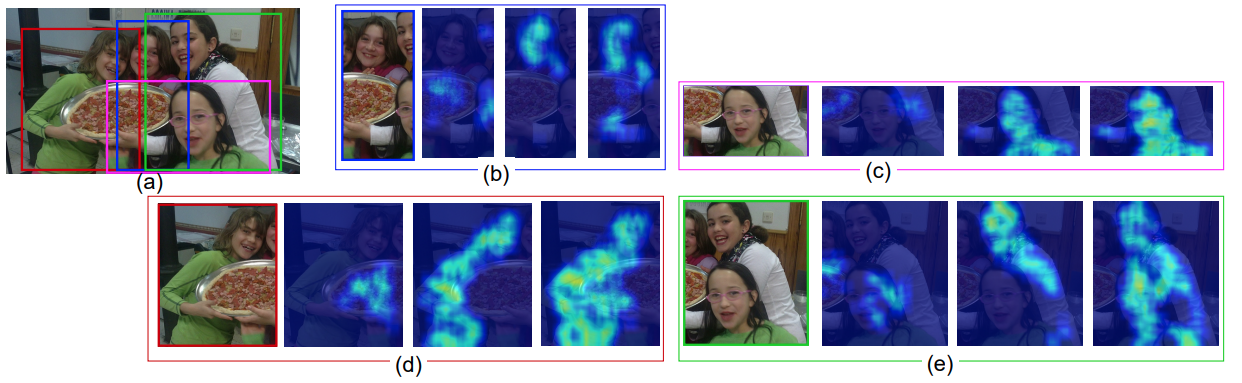
AOE-Net: Entities Interactions Modeling with Adaptive Attention Mechanism for Temporal Action Proposals Generation
-K. Vo, S. Truong, K. Yamazaki, B. Raj, MT. Tran, N. Le, International Journal of Computer Vision (IJCV), 2022
-
Contextual Explainable Video Representation:\Human Perception-based Understanding
-K. Vo, K. Yamazaki, P. X Nguyen, P. Nguyen, K. Luu, N. Le, IEEE Signal Processing Asilomar, 2022
-
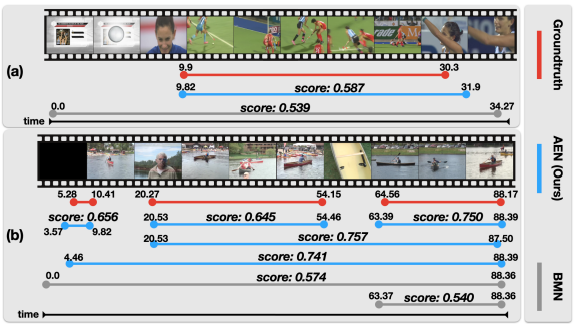
Agent-Environment Network for Temporal Action Proposal Generation
-V. Vo-Ho, N. Le, K. Yamazaki, A. Sugimoto, and M. Tran, IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2021
-
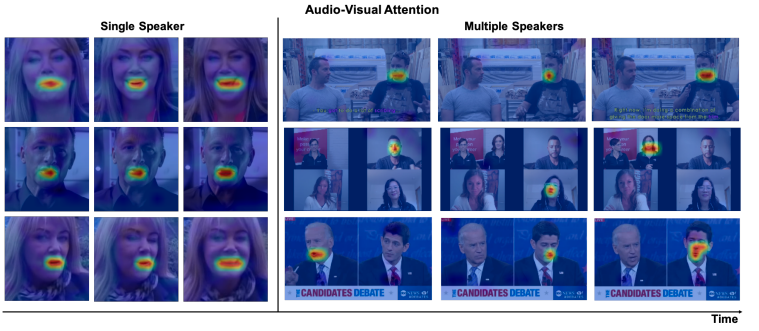
The Right to Talk: An Audio-Visual Transformer Approach
-T.-D Truong, C. Nhan Duong, T. D. Vu, H. Anh Pham, B. Raj, N. Le, K. Luu, ICCV, 2021
-
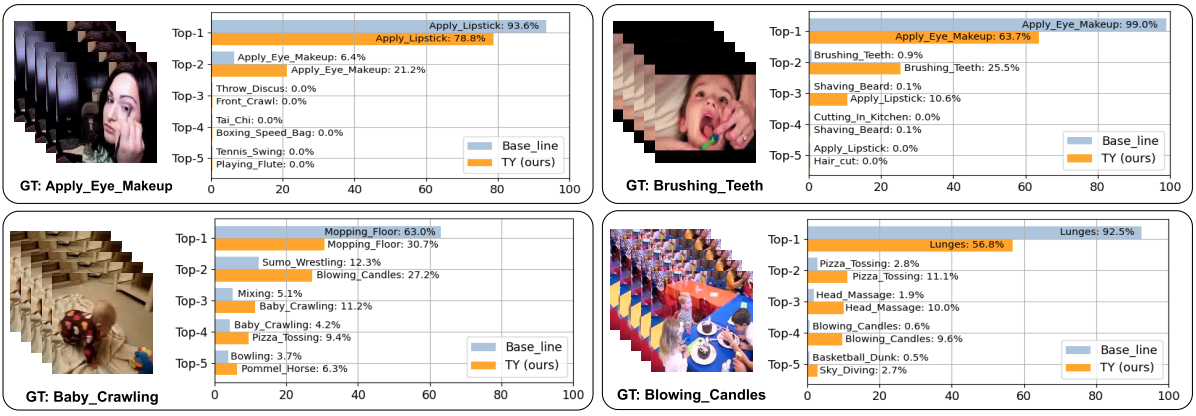
Teaching yourself: A self-knowledge distillation approach to action recognition
-D.-Q Vu, N. Le, J.-C Wang, IEEE, 2021
-
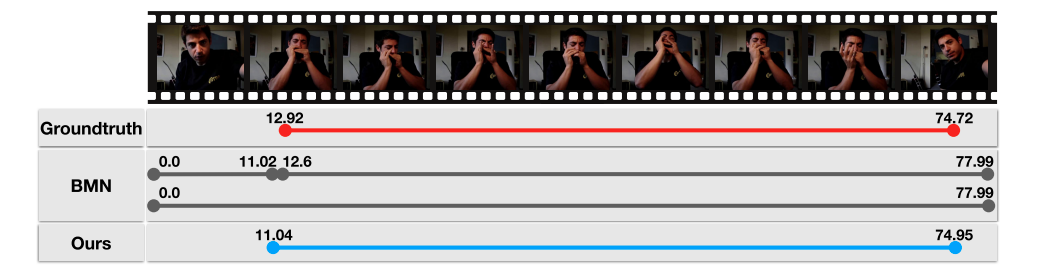
ABN: Agent-Aware Boundary Networks for Temporal Action Proposal Generation
-K. Vo, K. Yamazaki, S. Truong, M.-T. Tran, A. Sugimoto, and N. Le, IEEE Access, 2021
-
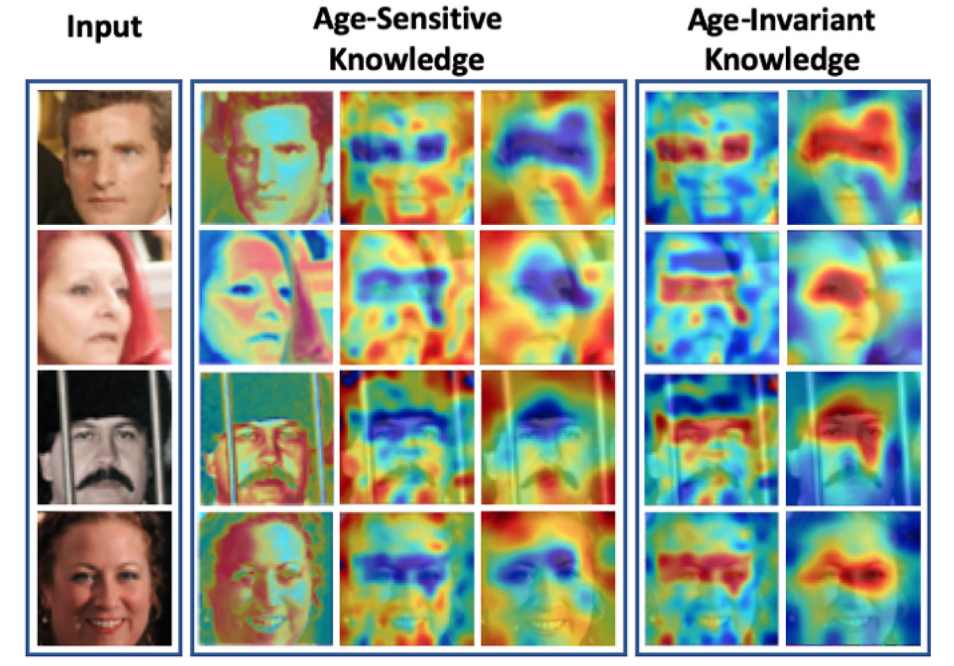
LIAAD: Lightweight attentive angular distillation for large-scale age-invariant face recognition
-T. -D Truong, C. N. Duong, K. G. Quach, N. Le, T. D. Bui, K. Luu, Elsevier, 2023
-
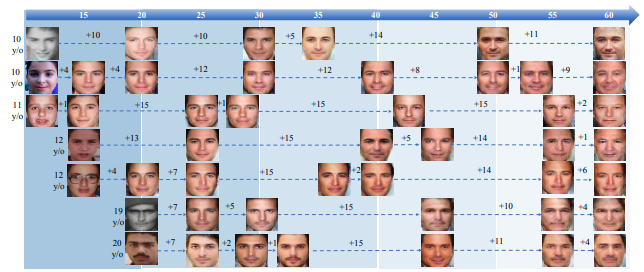
Learning from longitudinal face demonstration—where tractable deep modeling meets inverse reinforcement learning
-C. N. Duong, K. G. Quach, K. Luu, T Le, M. Savvides, T. D. Bui, Springer, 2019
-
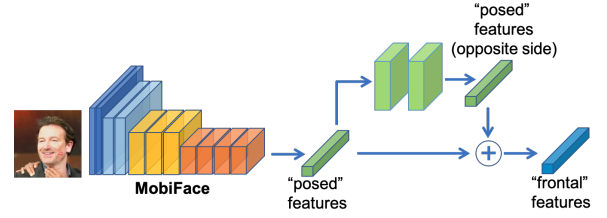
Mobiface: A lightweight deep learning face recognition on mobile devices
-C. N. Duong, K. G. Quach, I. Jalata, N. Le, K. Luu, IEEE, 2019
-
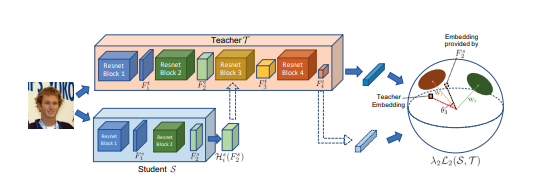
Shrinkteanet: Million-scale lightweight face recognition via shrinking teacher-student networks
-C. N. Duong, K. Luu, K. G. Quach, N. Le, arXiv, 2019
-
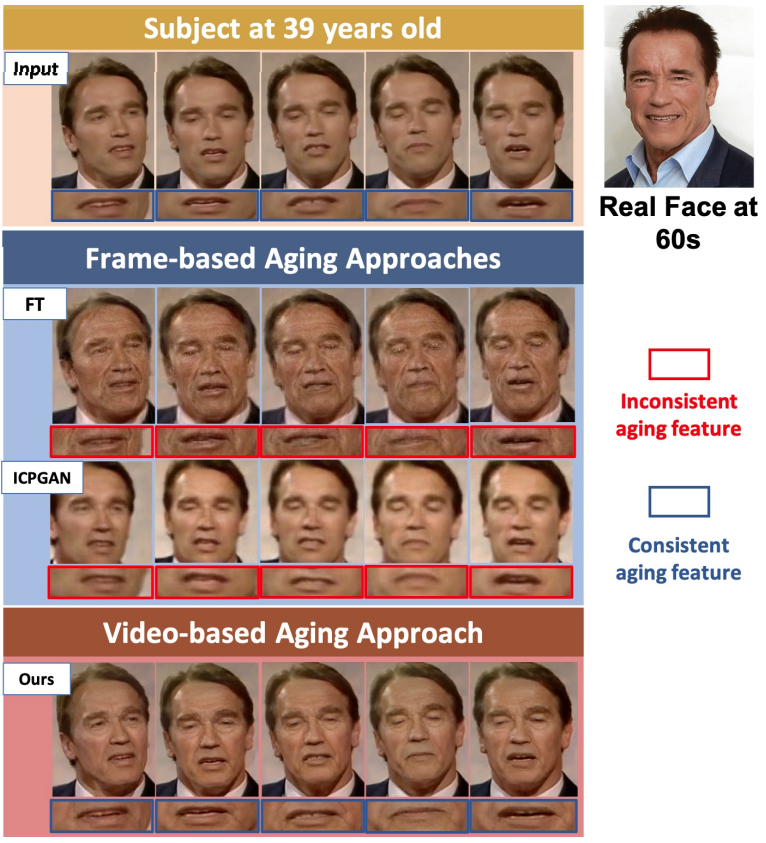
Automatic Face Aging in Videos via Deep Reinforcement Learning
-C.N. Duong, K. Luu, K.G. Quach, N. Nguyen, E. Patterson, T.D. Bui, N. Le, CVPR, 2018
-

Semi self-training beard/moustache detection and segmentation simultaneously
-N. Le, K. Luu, C. Zhu, M. Savvides, Elsevier, 2017
-
Weakly supervised facial analysis with dense hyper-column features
-C. Zhu, Y. Zheng, K. Luu, N. Le, C. Bhagavatula, M Savvides, IEEE, 2016
-

A novel shape constrained feature-based active contour model for lips/mouth segmentation in the wild
-N. Le, M. Savvides, Pergamon, 2016
-

Towards a deep learning framework for unconstrained face detection
-Y. Zheng, C. Zhu, K. Luu, C. Bhagavatula, N. Le, M. Savvides, IEEE, 2016
-
Deep Reinforcement Learning in Computer Vision: A Comprehensive Survey
-N. Le, K. Yamazaki, V. Rathour, K. Luu, and M. Savvides, Artificial Intelligence Review, 2021
-
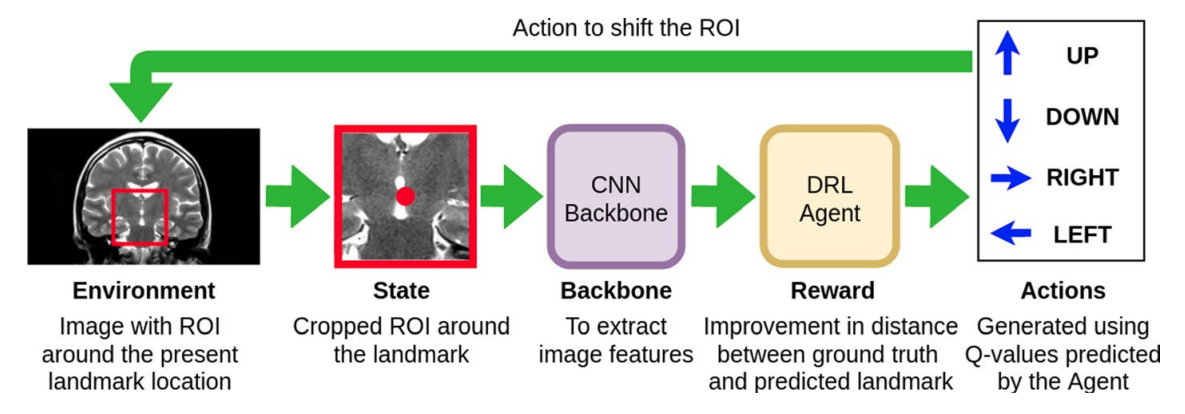
Deep reinforcement learning in medical imaging: A literature review
-S. K. Zhou, N. Le, K. Luu, H. V. Nguyen, N. Ayache, Medical Image Analysis, 2021
-

SolarFormer: Multi-scale Transformer for Solar PV Profiling
-A. de Luis, M. Tran, T. Hanyu, A. Tran, L. Haitao, R. McCann, A. Mantooth, Y. Huang, N. Le, SGSMA, 2024
-
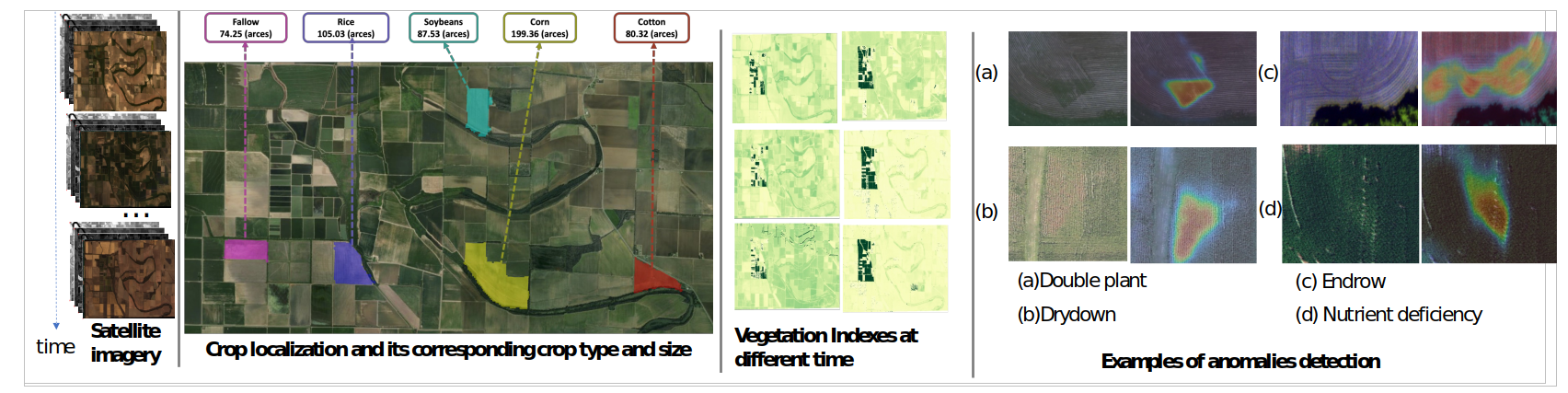
S3Former: Agriculture Satellite Understanding
-Taisei Hanyu, Ngan T.H. Le
-
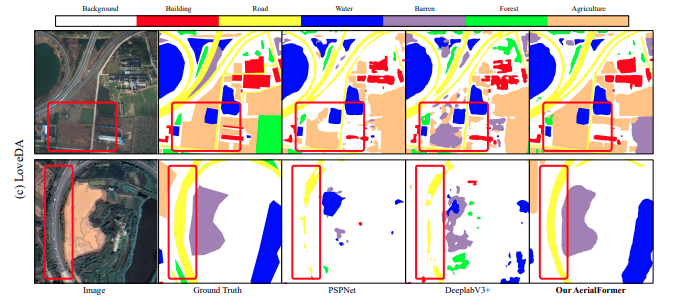
AerialFormer: Multi-resolution Transformer for Aerial Image Segmentation
-K. Yamazaki, T. Hanyu, M. Tran, A. Garcia, A. Tran, R. McCann, H. Liao, C. Rainwater, M. Adkins, A. Molthan, J. Cothren, N. Le, arXiv, 2023
-
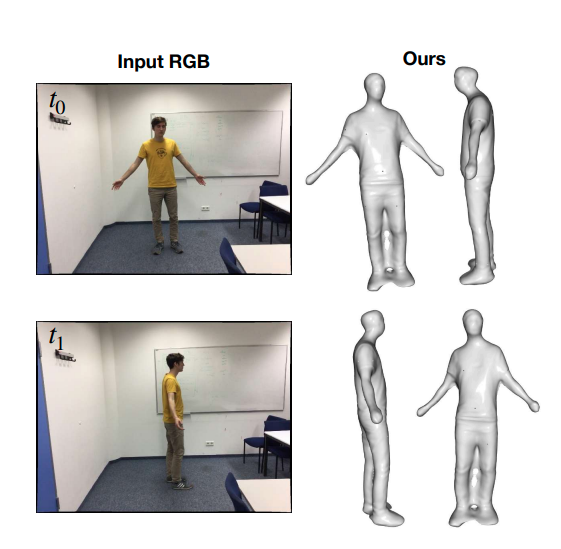
DNA: Deformable Neural Articulations Network for Template-Free Dynamic 3D Human Reconstruction From Monocular RGB-D Video
-K. Vo, T.-T Pham, K. Yamazaki, M. Tran, N. Le, IEEE/CVF, 2023
-
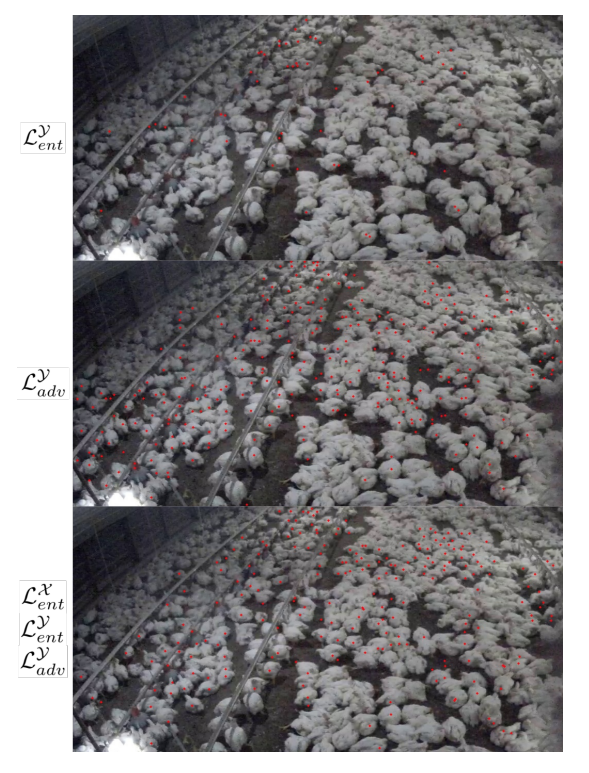
Self-supervised Domain Adaptation in Crowd Counting
-P. Nguyen, T.-D Truong, M. Huang, Y. Liang, N. Le, K. Luu , ICIP, 2022
-
Chicken Processing Plant With Automated Computer Vision
-Ngan T.H. Le, Michael Kidd, P2757US00, UADA 2021-020 (UAF 2021-032)
-

Chick Sexing on Face Part
- Artificial Intelligence And Vision-Based Broiler Body Weight Measurement System And Process
-
Chick Gait Identification
-Minh Tran, Ngan T.H. Le
-
Multi-Camera Multiple Chicken Monitoring
-Thin Phan, Ngan T.H. Le
Medical Analysis
-
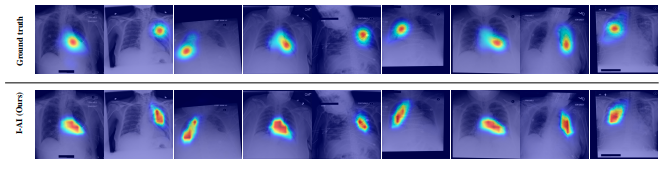
I-AI: A Controllable and Interpretable AI System for Decoding Radiologists Intense Focus for Accurate CXR Diagnoses
-T. Pham, J. Brecheisen, A. Nguyen, H. Nguyen, N. Le, WACV, 2024
-
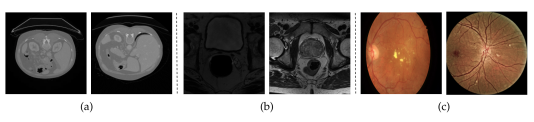
On the Out of Distribution Robustness of Foundation Models in Medical Image Segmentation
-Duy M. H. Nguyen, Tan N. Pham, N. T. Diep, N. Phan, Q. Pham, V. Tong, B. T. Nguyen, N. Le, N. Ho, P. Xie, D. Sonntag, NeurIPS, 2023
-
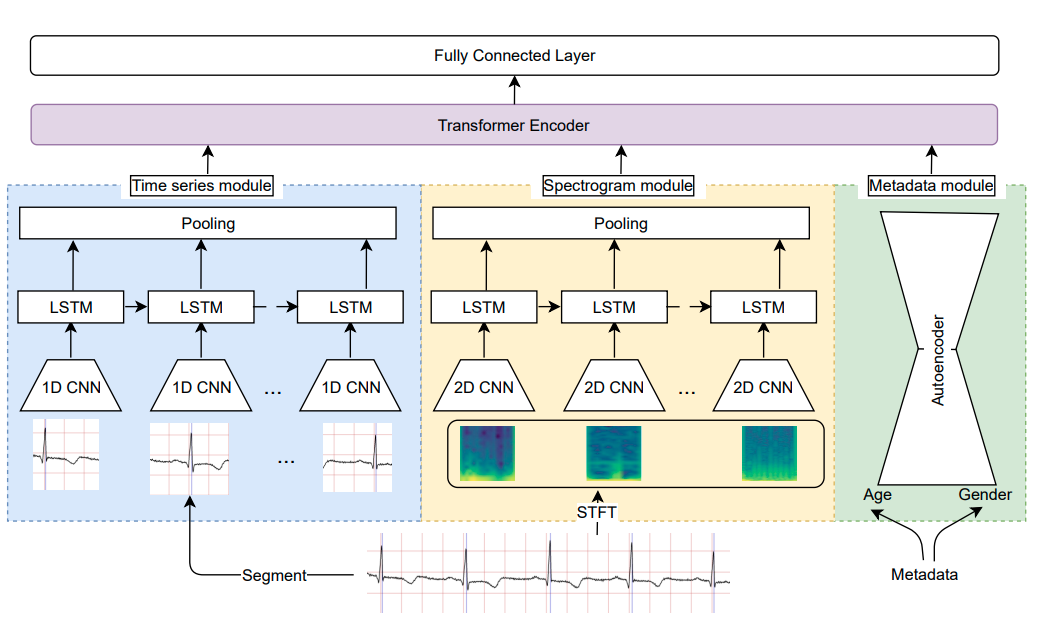
Multi-module Recurrent Convolutional Neural Network with Transformer Encoder for ECG Arrhythmia Classification
-M. D. Le, V. S. Rathour, Q. S. Truong, Q. Mai, P. Brijesh, N. Le, IEEE, 2021
-
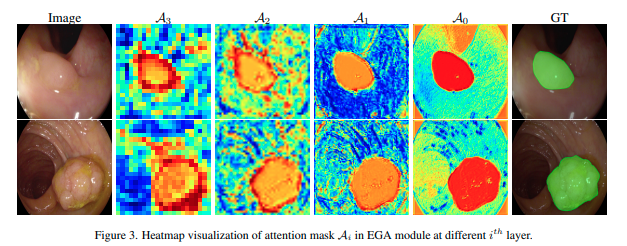
MEGANet: Multi-Scale Edge-Guided Attention Network for Weak Boundary Polyp Segmentation
-N.-T Bui, D.-H Hoang, Q.-T Nguyen, M.-T Tran, N. Le, WACV, 2024
-
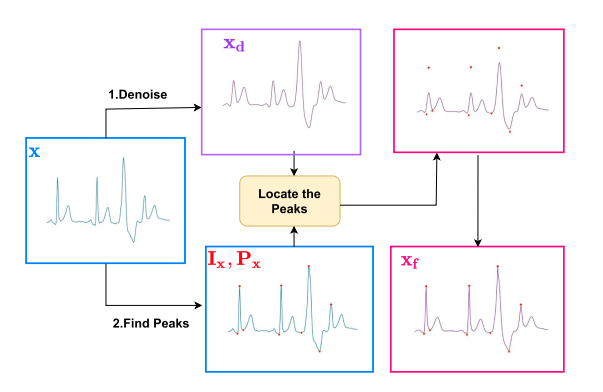
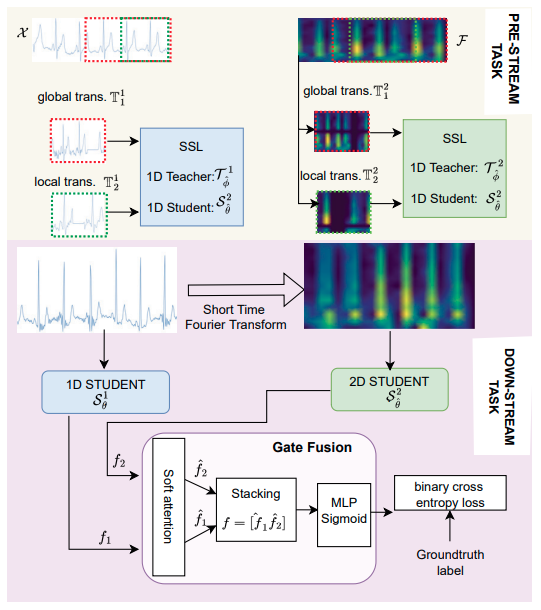
TSRNet: Simple Framework for Real-time ECG Anomaly Detection with Multimodal Time and Spectrogram Restoration Network
-N.-T Bui*, D.-H Hoang*, T. Phan, M.-T Tran, B. Patel, D. Adjeroh, N. Le, ISTaisei HanyuBI, 2024
-
sCL-ST: Supervised Contrastive Learning with Semantic Transformations for Multiple Lead ECG Arrhythmia Classification
-V.-K Vo-Ho, K. Yamazaki, H. Hoang, M.-T Tran, N. Le, IEEE, 2023
-
SS-3DCapsNet: Self-supervised 3D Capsule Networks for Medical Segmentation on Less Labeled Data
-M. Tran, L. Ly, B.-S Hua, N. Le , ISBI, 2022
-
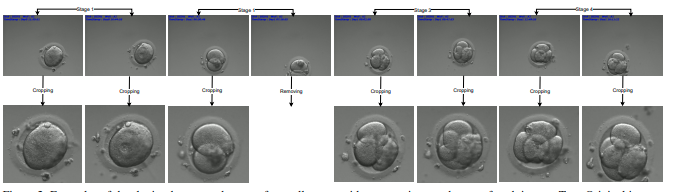
EmbryosFormer: Deformable Transformer and Collaborative Encoding-Decoding for Embryos Stage Development Classification
-T.-P Nguyen, T.-T Pham, T Nguyen, H. Le, D. Nguyen, H. Lam, P. Nguyen, J. Fowler, M.-T Tran, N. Le, WACV, 2022
-
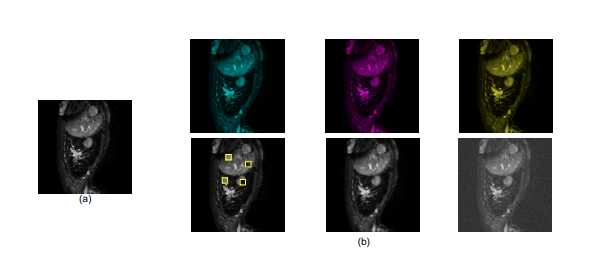
Multimodality Multi-Lead ECG Arrhythmia Classification using Self-Supervised Learning
-T. Phan, D. Le, P. Brijesh, D. Adjeroh, J. Wu, M. Olgaard Jensen, N. Le, BHI, 2022
-
3DConvCaps: 3DUnet with Convolutional Capsule Encoder for Medical Image Segmentation
-M. Tran, V.-K Vo-Ho, N. Le, ICPR, 2022
-
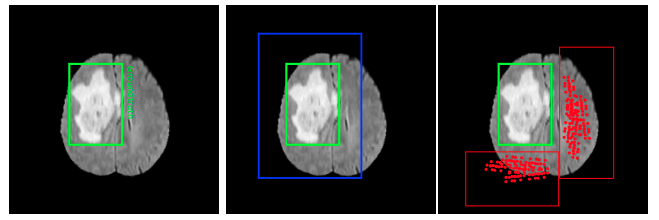
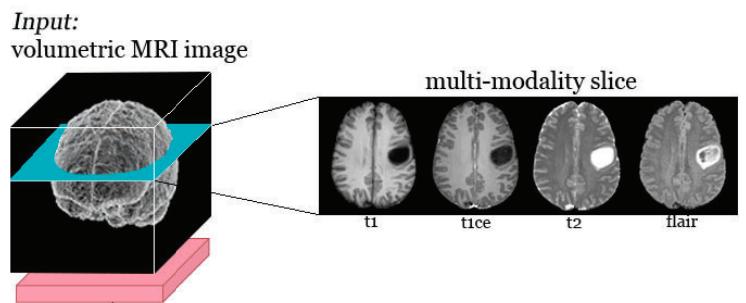
A Multi-task Contextual Atrous Residual Network for Brain Tumor Detection and Segmentation
-N. Le, K. Yamazaki, K. Quach, D. Truong, and M. Savvides, International Conference on Pattern Recognition (ICPR), 2021
-
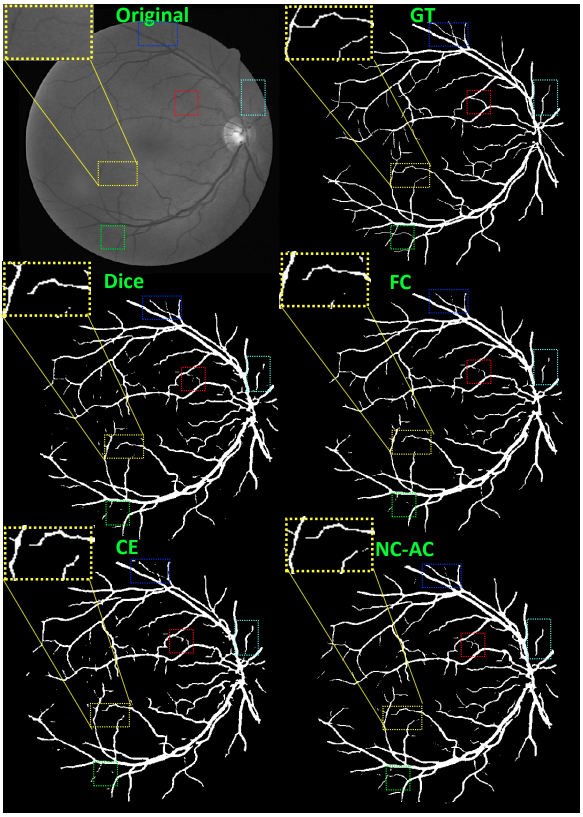
Offset Curves Loss for Imbalanced Problem in Medical Segmentation
-N. Le, T. Le, K. Yamazaki, B. Toan, K. Luu, International Conference on Pattern Recognition (ICPR), 2021
-
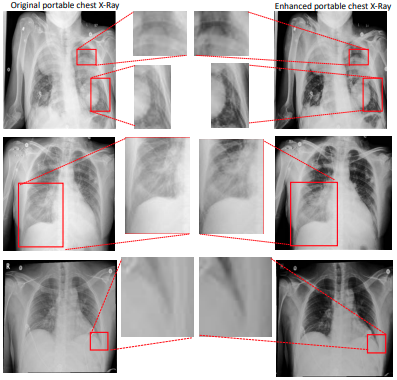
Pairflow: Enhancing portable chest x-ray by flow-based deformation for covid-19 diagnosing
-N. Le, J. Sorensen, T. D. Bui, A. Choudhary, K. Luu, H. Nguyen, ICIP, 2021
-
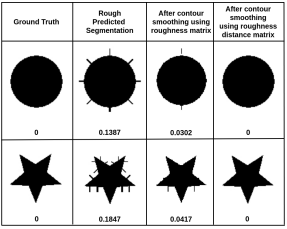
Roughness Index and Roughness Distance for Benchmarking Medical Segmentation
-V. Singh Rathour, K. Yamakazi, T Le, Bioimaging, 2021
-
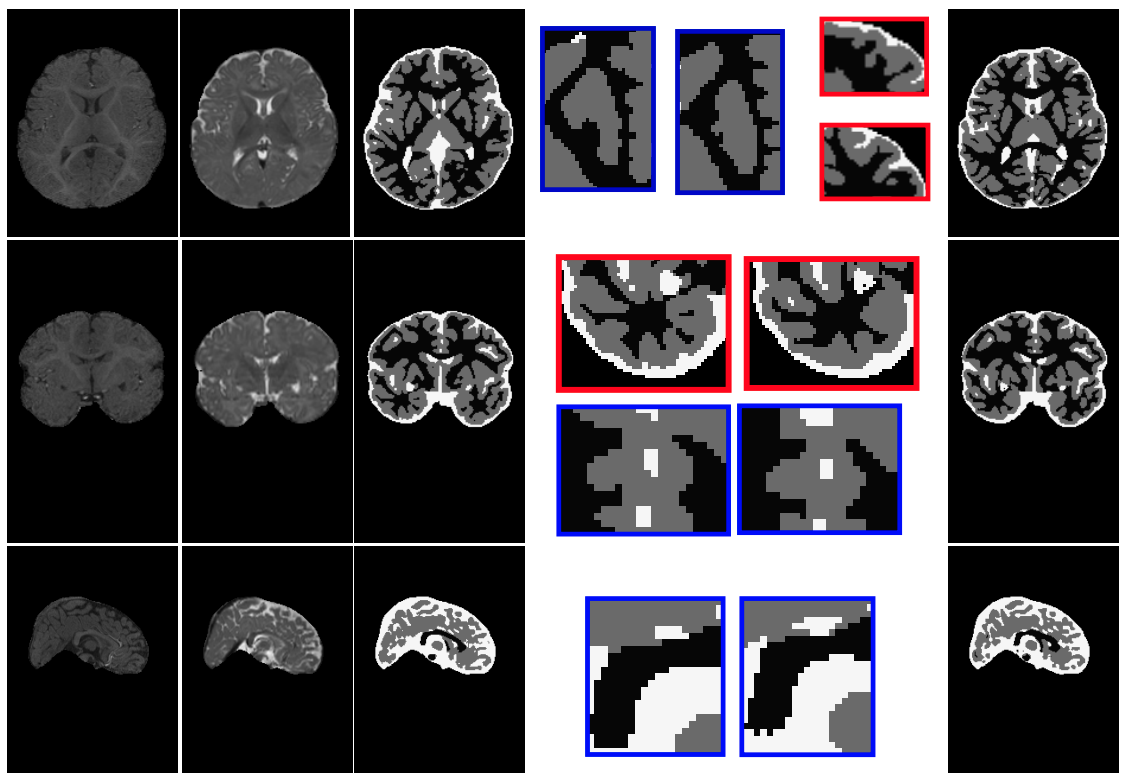
DAM-AL: Dilated Attention Mechanism with Attention Loss for 3D Infant Brain Image Segmentation
-D.-H Hoang, G.-H Diep, M.-T Tran, N. Le, ACM, 2021
-
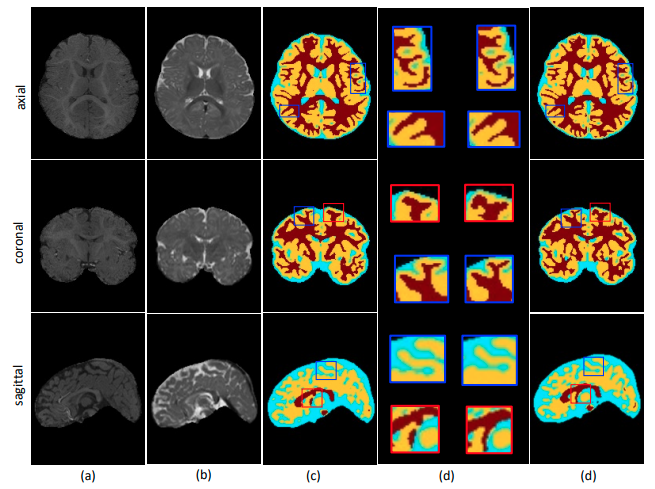
Deep Recurrent Level Set for Segmenting Brain Tumors
-N. Le, R. Gummadi, M. Savvides, Springer, 2018
-
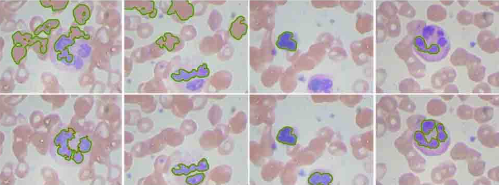
An automatic cells detection and segmentation
-L. Han, N. Le, M. Savvides, SPIE, 2017
-
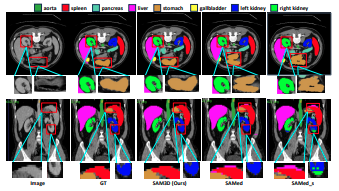
SAM3D: Segment Anything Model in Volumetric Medical Images
-N.-T Bui*, D.-H Hoang*, M.-T Tran, G. Doretto, D. Adjeroh, B. Patel, A. Choudhary, N. Le, ISBI, 2024
-
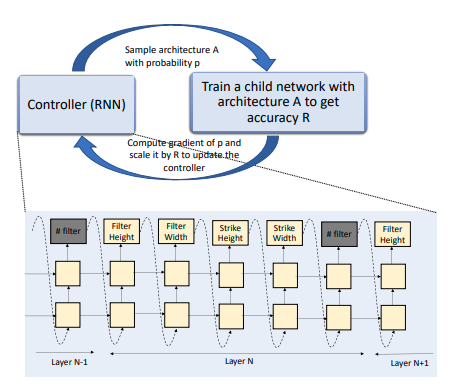
Chapter 19 - Neural architecture search for medical image applications
-V.-K Vo-Ho, K. Yamazaki, H. Hoang, M.-T Tran, N. Le, Academic Press, 2023
-
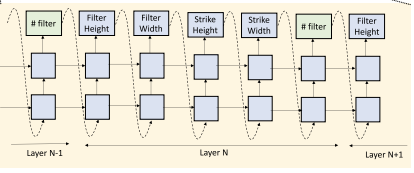
Neural architecture search for medical image applications
-V.-K. Vo-Ho, K. Yamazaki, H. Hoang, M.-T Tran, N. Le, Academic Press, 2023
-
Invertible Residual Network with Regularization for Effective Volumetric Segmentation
-K. Yamazaki, N. Le, V. Rathour, SPIE Medical Imaging, 2022
-
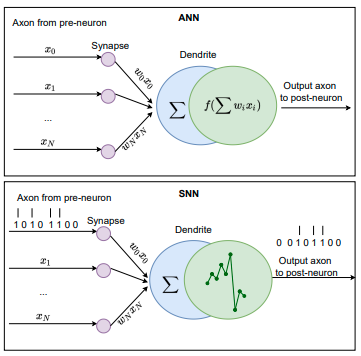
Spiking neural networks and their applications: A Review
-K. Yamazaki, K. Vo-Ho, D. Bulsara, N. Le, Brain Sciences, 2022
-
Enhance portable radiograph for fast and high accurate covid-19 monitoring
-N. Le, J. Sorensen, T. Bui, A. Choudhary, K. Luu, H. Nguyen, MDPI, 2021
-
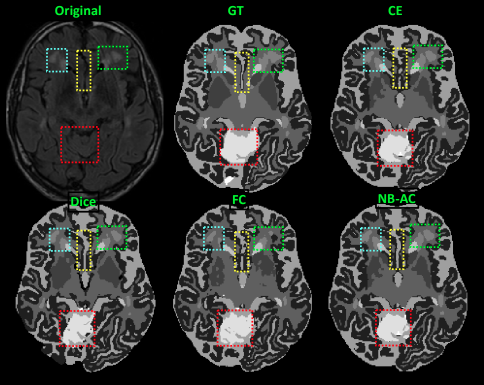
Narrow Band Active Contour Attention Model for Medical Segmentation
-N. Le, T. Bui, K. Vo-Ho, K. Yamazaki, K. Luu, Diagnostics, 2021